انواع پهباد ها
پهپادها: از اصول پرواز تا کاربردهای نظامی و غیرنظامی
این روزها نام پهپاد (پرنده هدایتپذیر از دور) یا همان “درون” انگلیسی، بیش از همیشه به گوش میرسد و آنها را در کاربردهای مختلفی از اسباببازی گرفته تا ابزارهای فیلمبرداری و حتی تسلیحات تعیینکننده در جنگهای امروزی میبینیم. در این مقاله، قصد داریم از منظر علمی و فیزیکی به بررسی چگونگی پرواز پهپادها و انواع مختلف آنها بپردازیم.
درک نیروی خالص و قانون عمل و عکسالعمل
برای اینکه یک جسم ساکن به حرکت درآید، باید یک نیروی خالص به آن وارد شود. نیروی خالص به معنای برآیند تمامی نیروهای وارد بر جسم است؛ اگر مجموع این نیروها صفر باشد، جسم حرکت نخواهد کرد، حتی اگر نیروهایی به آن وارد شده باشند (مثلاً وزن جسم و نیروی تکیهگاه). برای حرکت با سرعت ثابت به سمت بالا، نیروی وارد شده باید با وزن جسم برابر باشد، زیرا در این حالت نیز نیروی خالص صفر است و طبق قانون اول نیوتن، جسم به حرکت خود با سرعت ثابت ادامه میدهد.
نحوه ایجاد نیروی خالص: اما برای وارد کردن نیرو به یک جسم، باید جسم دیگری وجود داشته باشد که این نیرو را وارد کند. قانون عمل و عکسالعمل بیان میکند که اگر ما به جسمی نیرو وارد کنیم، آن جسم نیز نیرویی برابر و در خلاف جهت به ما وارد میکند. این قانون به ما امکان میدهد بپریم؛ زیرا وقتی نیرویی بیشتر از وزنمان به زمین وارد میکنیم، زمین نیز نیرویی بیشتر از وزن ما به ما وارد کرده و باعث بلند شدن ما میشود. پس از جدا شدن از زمین، تنها جسمی که با آن در تماس هستیم، هواست. برای ادامه حرکت رو به بالا در هوا، باید نیرویی به اندازه وزنمان به هوا وارد کنیم تا هوا نیز همین نیرو را به ما بازگرداند.
کشف آیرودینامیک: ایرفویل و نیروی لیفت
هنگامی که بشر کشف کرد که حرکت دادن یک شکل خاص (معروف به ایرفویل) در هوا، نیرویی عمود بر جهت حرکت به آن وارد میکند، مشکلات پرواز تا حد زیادی حل شد. توجیه ساده این پدیده این است که ایرفویل هوا را به سمت پایین هل میدهد و طبق قانون عمل و عکسالعمل، هوا نیز نیرویی رو به بالا به آن وارد میکند.
این اصل مبنای ساخت بال هواپیما و پره ملخ است. در ملخ، چرخاندن پرهها با سرعت زیاد، هوا را به عقب هل میدهد و در نتیجه ملخ به جلو حرکت میکند. اگر همین ملخ به صورت افقی قرار گیرد و هوا را به پایین هل دهد، هوا نیز ملخ را به بالا هل خواهد داد.
دو روش اصلی پرواز: به طور کلی، دو راه اصلی برای پرواز وجود دارد:
1. بال ثابت: وسیلهای مانند هواپیما باید به صورت افقی در هوا حرکت کند تا با عبور هوا از روی بالها، نیروی رو به بالا (لیفت) ایجاد شود.
2. بال متحرک (ملخ): بالها به صورت متحرک (ملخ) در میآیند که با چرخش خود هوا را حرکت داده و نیروی رو به بالا را تولید میکنند.
پهپادها: هواپیماها و هلیکوپترهای بدون سرنشین
پهپادها اساساً هواپیماها و هلیکوپترهایی هستند که به صورت بدون سرنشین کنترل میشوند.

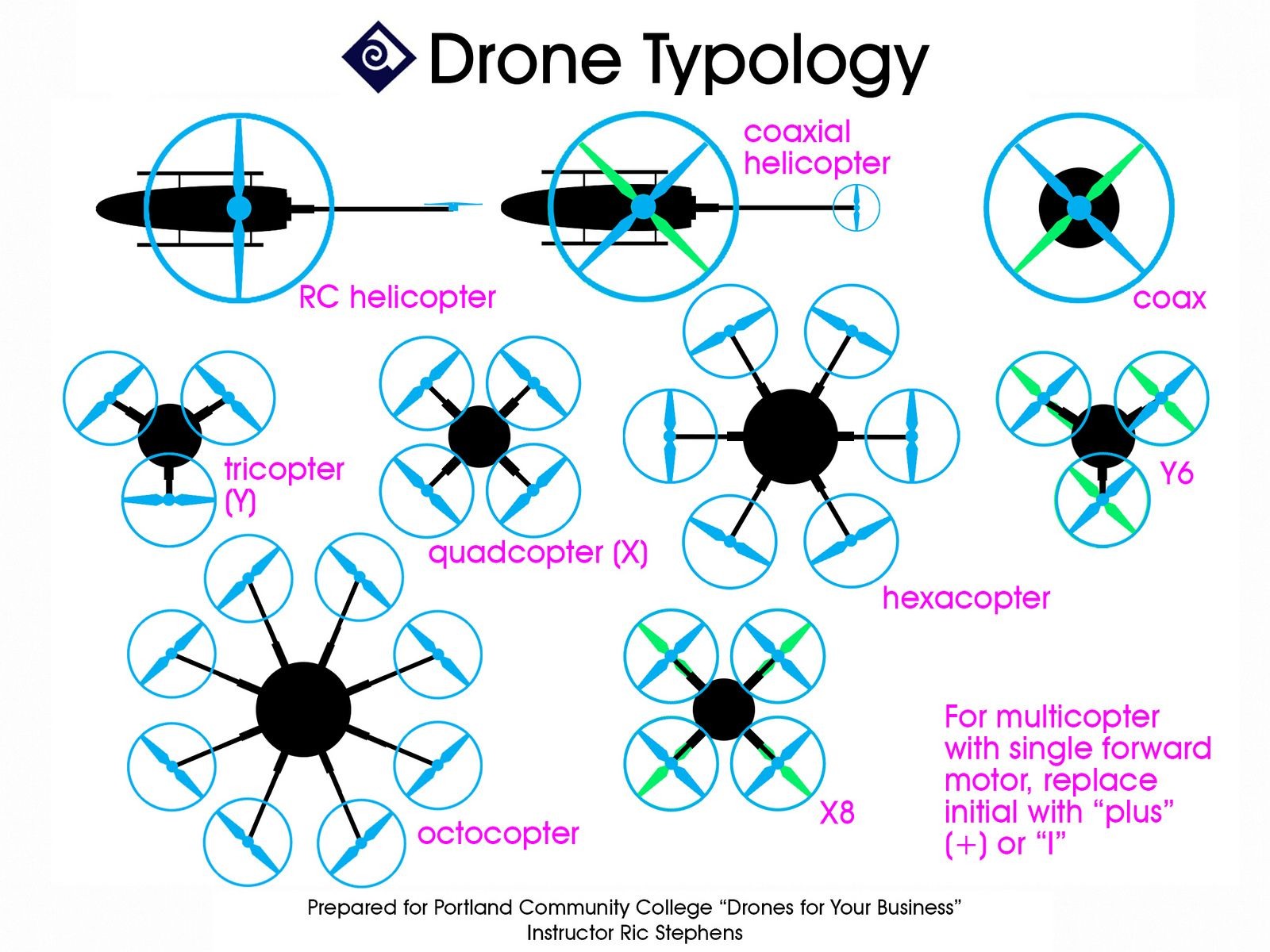
پهپادهای چند ملخی (کوادکوپترها)
این پهپادها از ملخ برای پرواز عمودی استفاده میکنند. یک چالش در استفاده از ملخ، گشتاور (اثر دورانی نیرو) است. هنگامی که یک موتور ملخ را میچرخاند، گشتاوری به ملخ وارد میکند و طبق قانون عمل و عکسالعمل، ملخ نیز گشتاوری برعکس به پهپاد وارد میکند که باعث چرخش ناخواسته بدنه پهپاد میشود.
خنثی کردن گشتاور: برای خنثی کردن این گشتاور:
1. در هلیکوپترها: معمولاً از یک ملخ عمودی کوچکتر در دم استفاده میشود که نیرویی مخالف برای جلوگیری از چرخش ایجاد میکند.
2. در پهپادها: از دو یا چند ملخ که در جهتهای مختلف میچرخند، استفاده میشود تا گشتاورهای یکدیگر را خنثی کنند. بهینهترین تعداد ملخ برای این کار چهار ملخ است، از این رو به آنها کوادکوپتر (چهار موتوره) نیز میگویند. در کوادکوپترها، ملخهای قطری در یک جهت میچرخند (مثلاً دو ملخ ساعتگرد و دو ملخ پادساعتگرد).
چگونگی کنترل یک کوادکوپتر:
کوادکوپترها صرفاً با تغییر سرعت چهار موتور و چهار ملخ خود، بدون نیاز به هیچ قطعه متحرک دیگری، میتوانند تمامی مانورهای ممکن را انجام دهند.
برخاستن و ثابت ماندن در ارتفاع: برای بلند شدن، سرعت چرخش هر چهار ملخ اندکی بیشتر از حدی میشود که نیروی وارد شده به هوا بیشتر از وزن پهپاد شود و سپس برای ثابت ماندن در ارتفاع یا حرکت با سرعت ثابت به بالا، نیروی تولیدی ملخها با وزن پهپاد برابر میشود.
جلو (پیچ): برای حرکت به سمت جلو، سرعت ملخهای عقب بیشتر و سرعت ملخهای جلو کمتر میشود. این کار باعث خم شدن پهپاد به سمت جلو میشود و نیروی خالص مایل به جلو، حرکت افقی را ایجاد میکند.
حرکت جانبی (رول): برای حرکت به سمت کنارهها، سرعت ملخهای یک طرف (مثلاً سمت چپ) با ملخهای طرف دیگر (راست) متفاوت میشود تا پهپاد به آن سمت کج شود.
چرخش حول محور عمودی (یاو): برای چرخش کنترل شده، میتوان سرعت چرخش ملخهای قطری که در یک جهت میچرخند (مثلاً هر دو ملخ ساعتگرد) را کم و زیاد کرد.
کنترل و حسگرها در پهپادها:
پهپادهای ساده/اسباببازی: صرفاً دستورات کنترلر را دریافت میکنند و خودشان نمیتوانند مسیر پرواز را تصحیح کنند؛ باد شدید میتواند آنها را از کنترل خارج کند.
پهپادهای پیشرفته: مجهز به حسگرها، قدرت پردازش بالا و کنترلگر هستند که امکان اصلاح حرکات به صورت خودکار را فراهم میکنند.
حسگرهای مهم:
IMU (واحد اندازهگیری اینرسی): یک تراشه شامل شتابسنج (اندازهگیری شتاب در سه جهت)، ژیروسکوپ (اندازهگیری دوران حول سه محور)، و قطبنمای مغناطیسی (اندازهگیری موقعیت نسبت به شمال و جنوب مغناطیسی).
بارومتر (فشارسنج): برای اندازهگیری تغییرات ارتفاع بر اساس تغییرات فشار هوا.
موقعیتیابی دقیق:
از آنجا که دادههای حسگرها ممکن است دچار خطا (نویز الکترومغناطیسی، لرزش موتورها) شوند، پهپادها اطلاعات این حسگرها را با روشهای دیگر ترکیب میکنند تا به موقعیت دقیقتری دست یابند.
ماهوارههای GPS (و GLONASS): برای تعیین مختصات دقیق.
رادار: با ارسال و دریافت امواج رادیویی، نقشه سه بعدی از محیط اطراف ایجاد میکند (برای بردهای بیشتر با جزئیات کمتر).
لیدار: با ارسال امواج مادون قرمز، نقشه سه بعدی با جزئیات بیشتر در برد کمتر ترسیم میکند.
پردازش تصویر: با استفاده از دوربینها، موقعیت پهپاد نسبت به اشیا اطراف را مشخص میکند.

سیستم کنترل:
تمامی سامانههایی که پهپاد را کنترل میکنند، شامل سنسورها، پردازنده و برنامههای کامپیوتری، سیستم کنترل نامیده میشوند. این سیستم به صورت لحظهای نیروی ملخها را تغییر میدهد تا پهپاد در مسیر و زاویه مطلوب باقی بماند یا به آن بازگردد (مثلاً در برابر وزش باد). این محاسبات بسیار پیچیده هستند و نیاز به حل معادلات دیفرانسیل دارند.
محدودیتها و قابلیتها:
پهپادهای چند ملخی: میتوانند بیش از ۴ ملخ داشته باشند که معمولاً برای حمل بارهای سنگینتر استفاده میشوند.
زمان پرواز کوتاه: بین ۲۰ تا ۵۰ دقیقه.
برد پروازی محدود: از چند کیلومتر تا حداکثر ۱۵ کیلومتر (برای انواع تجاری).
انواع دیگر: پهپادهای سه ملخی (سختتر)، دو ملخی (سختتر اما مصرف انرژی کمتر و زمان پرواز طولانیتر)، و تک ملخی (مانند هلیکوپترها، مثل اینجینیوتی مریخنورد ناسا که با خم کردن محور چرخش ملخ تغییر جهت میداد).
پهپادهای بال ثابت
این پهپادها همان هواپیماهای کوچکی هستند که بدون خلبان پرواز میکنند.
مزایا: میتوانند زمان پرواز بسیار طولانیتری (ساعتها) داشته باشند و با سیستم کنترل ماهوارهای، مسافتهای هزاران کیلومتری را طی کنند. این امکان به دلیل صرفهجویی در فضای خلبان و اختصاص آن به سوخت و تجهیزات بیشتر فراهم میشود.
محدودیت: نمیتوانند به صورت عمودی برخاسته یا در یک نقطه ثابت بمانند؛ برای ایجاد نیروی لیفت، حتماً نیاز به حرکت افقی در هوا دارند.
کنترل: مانند هواپیماها، از بالکها (ailerons)، فلپها (flaps) و دم برای تغییر جهت و مانور استفاده میکنند.
پیشران: با موتورهای ملخی یا موتورهای جت.
برخاستن:
مانند هواپیماها، نیاز باند بلند برای رسیدن به سرعت کافی برای پرواز دارند. اما برای کاربردهای نظامی که باند همیشه در دسترس نیست، مکانیزمهای پرتاب ویژهای دارند:
*پرتاب با دست (برای انواع سبک).
*سیستمهای شبیه تیرکمان.
*موشکهای کوچک پرتابکننده.
*پرتاب از روی خودرو یا هواپیما.
*شلیک با مکانیزمهای شبیه تفنگ.

پهپادهای هیبریدی (ترکیبی)
این پهپادها برای برخاستن عمودی از ملخ استفاده میکنند و سپس در هوا، با تغییر جهت نیروی رانش، مانند یک پهپاد بال ثابت به پرواز ادامه میدهند. این سیستم مزایای هر دو نوع پهپاد را ترکیب میکند، اما ساخت آن بسیار دشوار است.
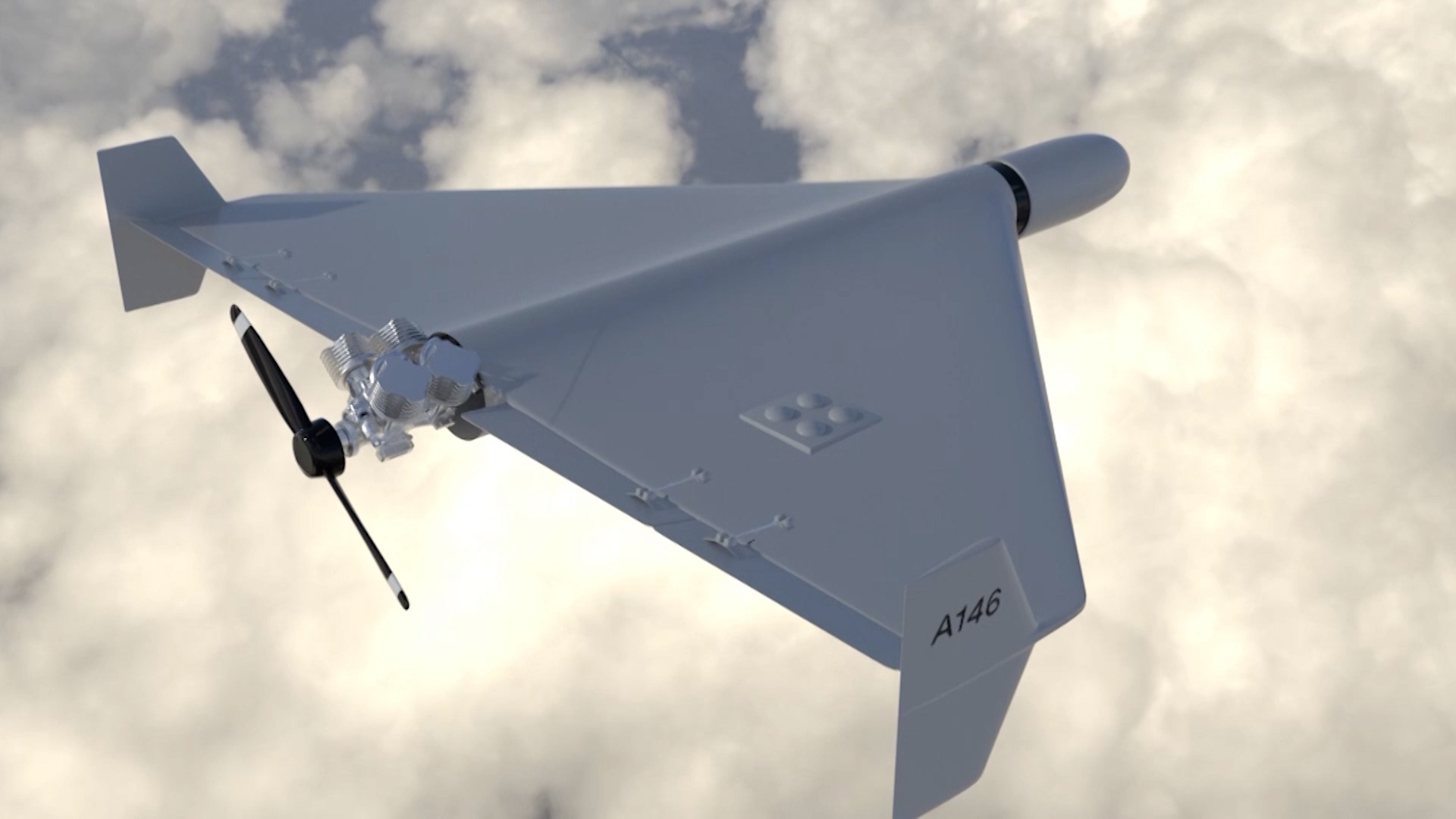
پهپاد ایرانی شاهد ۱۳۶
یکی از پهپادهایی که در سالهای اخیر به شهرت زیادی رسیده، پهپاد ایرانی شاهد ۱۳۶ است. این پهپاد به دلیل هزینه ساخت بسیار کم، قابلیت تولید انبوه در زمان کوتاه و قابلیت عبور از سامانههای دفاعی پیشرفته، بسیار شناخته شده است.
ابعاد: ۳.۵ متر طول و ۲.۵ متر عرض.
بالها: دو بال به شکل دلتا. این طراحی بال باعث میشود که پهپاد در سرعتهای کمتر نیز بتواند نیروی لیفت کافی برای پرواز را داشته باشد، زیرا سطح بال بیشتری فراهم میکند.
موتور: یک موتور بنزینی درونسوز چهار سیلندر دو زمانه با قدرت ۵۰ اسب بخار. این موتور به “موتور گازی” معروف است و صدای بسیار زیادی تولید میکند. صدای بلند آن، با وجود اینکه ممکن است عیب نظامی محسوب شود، اما در این پهپاد به یکی از مزایای روانی آن تبدیل شده است (مشابه هواپیماهای آلمانی استوکاستیک در جنگ جهانی).
عملکرد موتور دو زمانه:
دارای ابعاد کوچکتر، هزینه ساخت کمتر و قطعات متحرک کمتر (عدم سوپاپ، میلسوپاپ و بادامک). سوخت و روغن را مخلوط کرده و به داخل میکشد، توسط پیستون فشرده میشود، شمع جرقه میزند، سوخت منفجر شده و پیستون را به پایین هل میدهد.
پایین رفتن پیستون، راه خروج گاز سوخته شده را باز میکند و همزمان گاز جدید وارد میشود. معایب: به دلیل مخلوط شدن سوخت و روغن، آلودگی زیادی ایجاد میکند و ممکن است مقداری سوخت نسوخته از خروجی خارج شود که بازدهی آن را پایین میآورد.
ویژگیها: گشتاور کمی ایجاد میکنند اما نسبت به اندازهشان سرعت زیادی دارند.
اگزوز: هر سیلندر یک اگزوز جداگانه دارد که باعث پخش شدن گرمای موتور میشود. این ویژگی شناسایی آن را توسط حسگرهای حرارتی سامانههای دفاعی دشوارتر میکند.
پرتاب: نمیتواند از موتور اصلی برای رسیدن به سرعت اولیه لازم در مسافت کم استفاده کند؛ بنابراین، یک موشک کوچک به زیر آن متصل میشود که نیروی رانش کافی برای پرتاب اولیه را فراهم میکند و پس از چند ثانیه جدا میشود.
سطوح کنترل: دو سری بال متحرک (شهپر) در انتهای بال برای کنترل پیچ و رول پهپاد وجود دارد.
سیستم ناوبری: از سیستم هدایت اینرسیال (IGS) و سیستم موقعیتیابی جهانی GLONASS (معادل روسی GPS) استفاده میکند.
IGS: با استفاده از شتابسنج، ژیروسکوپ و قطبنما، موقعیت پهپاد را از لحظه شروع حرکت لحظه به لحظه ردیابی و محاسبه میکند. این سیستم خطای خود را با کمک سیستم موقعیتیابی ماهوارهای (GLONASS) تصحیح میکند تا به مکان دقیقی برسد.
مزیت IGS: اگر امواج ماهوارهای با اختلال الکترومغناطیسی مسدود شوند، این سیستم میتواند به تنهایی (البته با خطا) موقعیت پهپاد را تعیین کند و از خروج کامل آن از کنترل جلوگیری کند.

چرا شاهد ۱۳۶ در ارتفاع کم از سامانههای دفاعی عبور میکند؟
این پهپاد به دلیل پرواز در ارتفاع کم، توسط سیستمهای راداری به سختی ردیابی میشود. دلایل علمی آن عبارتند از:
انحنای زمین: امواج رادیویی رادار که موازی با سطح زمین ارسال میشوند، نمیتوانند اجسام کمارتفاع را از فاصله دور ردیابی کنند و تنها زمانی که جسم بسیار نزدیک میشود، قابل شناسایی است.
اجسام متفرقه (Clutter): در ارتفاع کم، موانعی مانند درخت و ساختمان زیاد هستند که شناسایی یک جسم را در میان آنها دشوار میکنند و برد امواج رادار در نزدیکی زمین کاهش مییابد.
بازتاب و تداخل امواج: امواج رادار پس از بازتاب از سطح زمین، با امواج مستقیم تداخل ایجاد میکنند که رادار را دچار گیجی میکند.
جذب امواج: اجسامی که در ارتفاع کم پرواز میکنند، امواج رادار را به گونهای بازتاب میکنند که بیشتر آنها توسط زمین جذب شده و مقدار کمتری به رادار بازمیگردد.
پهنای محدود عمودی امواج: امواج رادار دارای پهنای عمودی محدودی هستند و یک جسم کمارتفاع میتواند به راحتی خارج از این پهنا قرار گیرد و شناسایی نشود.
نتیجهگیری:
اگر این پهپاد توسط رادار شناسایی شود، به دلیل سرعت کم، سرنگونی آن با سیستمهای ضد موشکی و پدافندی کار آسانی است. اما اینجا بحث هزینه-اثربخشی مطرح میشود. در برابر هزینه ۱۰ تا ۲۰ هزار دلاری هر پهپاد شاهد ۱۳۶، کمارزشترین موشکهای پدافندی ۱۰۰ هزار دلار قیمت دارند و برخی تا چند میلیون دلار نیز میرسند. بنابراین، استفاده از موشکهای گرانقیمت برای سرنگونی این پهپادها اقتصادی نیست. اگرچه تیربارهای ضد هوایی میتوانند با هزینه کم آنها را سرنگون کنند، اما از آنجا که این پهپادها معمولاً به صورت دستهای و گروهی عملیات انجام میدهند، سرنگونی همه آنها در زمان کم بسیار دشوار میشود.
پست های مرتبط


GPSچطور کار میکنند و چرا زندگی ما به آنها وابسته است؟

آشکار سازی تغییرات کابری اراضی با استفاده از داده های سنجش از دور

آسیب های شهری با استفاده از تصاویر پهپادی وماهواره ایی